| CAN通信システム |
| ● |
通信回路によってデジタル信号に変換された複数項目の情報やデータを,一対の通信線(ツイストペア結線)で伝送するCAN*
[ISO11898]通信システムを採用しました。これにより,入力系(センサー・スイッチなど)・制御ユニット・出力系(モーターなど)をそれぞれ結ぶシステムに対して,ワイヤハーネスの削減および電子制御システムのスリム化をはかりました。
|
| 参 考 |
| * |
CANとはController Area Networkの略称で,ISO(国際標準化機構)の規格に準拠したシリアル通信です。
|
| ● |
| 参 考 |
| *1 |
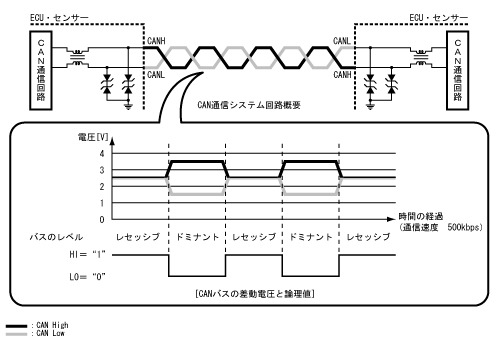
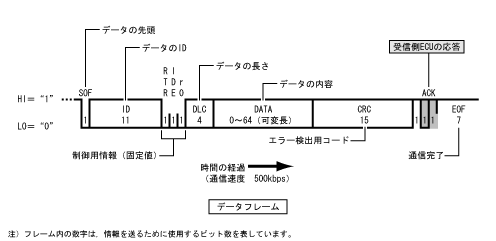
バスのレベルにはドミナント(優性)レベルとレセッシブ(劣性)レベルとがあり,CAN通信システムでは論理的にドミナントは“0”,レセッシブは“1”と判断されます。
|
| *2 |
信号の伝達速度を表す単位。“500kbps”は1秒間に500000ビットのデータが伝送されることを表します。
|
 |
 CAN通信ネットワーク CAN通信ネットワーク
|
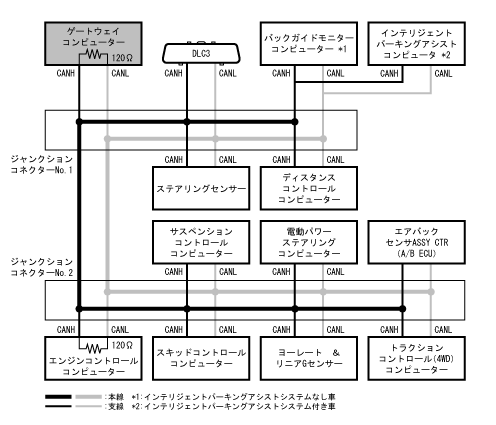
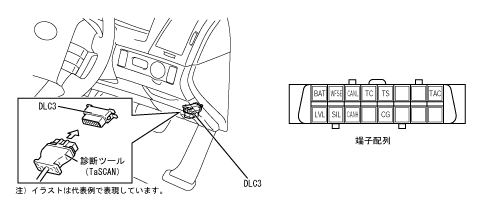
CAN通信システム構成
|
CAN通信プロトコル(通信規則)
|
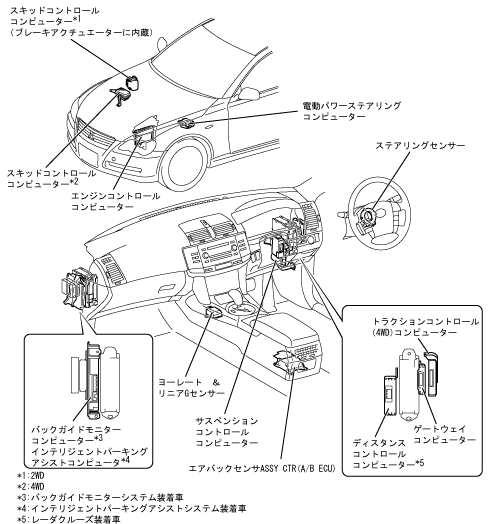
 関連部品 関連部品
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||