| ノックセンサー |
| ● |
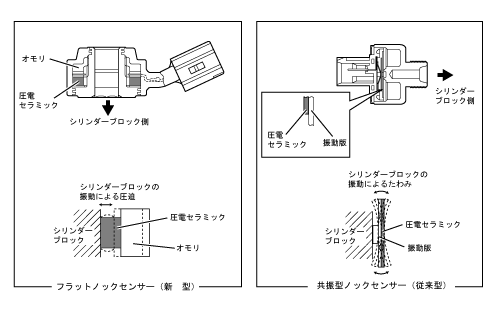
従来の共振型ノックセンサーは,シリンダーブロックからの振動を受けると,圧電セラミックの振動板がシリンダーブロック取り付け部を支点としてたわむことによって,圧電セラミックに圧力が加わり,電圧を発生します。
フラット(非共振型)ノックセンサーは,シリンダーブロックからの振動を受けると,オモリは慣性力によって移動に遅れが生じるため,シリンダーブロックとオモリの間に設けられた圧電セラミックに圧力が加わり,電圧を発生します。
|
 |
 ノックセンサー作動 ノックセンサー作動
|
| ノックセンサー |
| ● |
従来の共振型ノックセンサーは,シリンダーブロックからの振動を受けると,圧電セラミックの振動板がシリンダーブロック取り付け部を支点としてたわむことによって,圧電セラミックに圧力が加わり,電圧を発生します。
フラット(非共振型)ノックセンサーは,シリンダーブロックからの振動を受けると,オモリは慣性力によって移動に遅れが生じるため,シリンダーブロックとオモリの間に設けられた圧電セラミックに圧力が加わり,電圧を発生します。
|
|
| ノックセンサー作動
|